В условиях интенсификации современного промышленного производства возникает задача использования имеющегося технологического оборудования с максимальной эффективностью. Актуальность исследований в области оптимизации использования оборудования под различные, близкие между собой задачи, обусловлена необходимостью реализации имеющегося потенциала полностью и без остатка.
Интерес вызывает оптимизация производства с исключением человеческого фактора непосредственного выполнения функций управления и передачей их различных автоматическим устройствам. Своевременное принятие решения на использование только необходимого оборудования (технологических линий) обеспечит наибольшую технико-экономическую эффективность.
Технологический процесс характеризуется несколькими регулируемыми (управляемыми) величинами. При этом соответствие между производительностью и загрузкой конкретного узла определяет качественные показатели процесса, то есть задача адаптации узла предполагает поддержание заданных пределов регулируемых величин.
В соответствии с теорией автоматического управления имеется возможность представления регулируемой величины некоторой функцией, зависящей от воздействий на временном интервале. Как правило, существенное влияние оказывает возмущающие воздействия, которые могут носить случайный характер, а также определяться технологической схемой процесса.
Большим потенциалом обладают системы с переменной структурой. Они являются сложными нелинейными системами и их структура может изменяться в зависимости от значений переменного состояния.
Пусть система состоит из четырёх нелинейных регуляторов и двух блоков изменения структуры, работающих по принципу переключения (перехода из одного состояния в другое). Вариант структурной системы изображен на рисунке 1.

Рисунок 1 – Структурная схема системы с переменной структурой
На схеме обозначено: g(t) – задающее воздействие; y(t) – выходной сигнал; u(t) – управляющее воздействие; Р1- регулятор №1; Р2 – регулятор№2; Р3- регулятор №3; Р4- регулятор №4;БУС – блок управления структурой; ОУ – объект управления; ИУ – исполнительное устройство; БФСУ – блок формирования сигнала управления.
Предположим, что в рассматриваемой системе с переменной структурой объект управления описывается системами дифференциальных уравнений:
![]()
![]()
Модель объекта управления представим в виде совокупности четырех интеграторов, блока сумматора и блока-усилителя, с коэффициентом усиления 0,5. Условие переключения имеет вид:
![]() .
. ![]() .
.
Оно может установлено блоком «П» из пакета прикладных математических программ инструментов визуального моделирования.
Предложенная математическая модель сложной системы с переменной структурой изображена на рисунке 2.
Она полностью работоспособна и наглядно представляет результаты моделирования в реальном масштабе времени с возможностью их оценки.
XCOS – это приложение, входящее в состав математического моделирования Scilab и дает возможность проектирования систем в области механики, гидравлики, электроники, а также систем массового обслуживания [1, с. 11].
Данное приложение является графической средой интерактивной среды, в основе которой – блочное моделирование. Оно позволяет решать задачи динамического и ситуационного моделирования систем, процессов, отдельных устройств. Имеется возможность в реальном масштабе времени тестировать, анализировать и оптимизировать разрабатываемые проекты.
Закон управления реализуем блоками «Switch», «Filter» и «Inv». В зависимости от знака сигнала на выходе блока «П» в соответствии с выражением (1) блок «Switch» выполняет операцию переключения выхода с нуля на «-X». Снятие характеристик текущего состояния технологического процесса логично произвести с помощью блока «XY Scope».
Начальное состояние системы определяется интеграторами «Int1» и «Int2». Пусть в начальный (нулевой) момент времени задано:
![]() ;
;
![]() .
.
![]() ;
;
![]() .
.
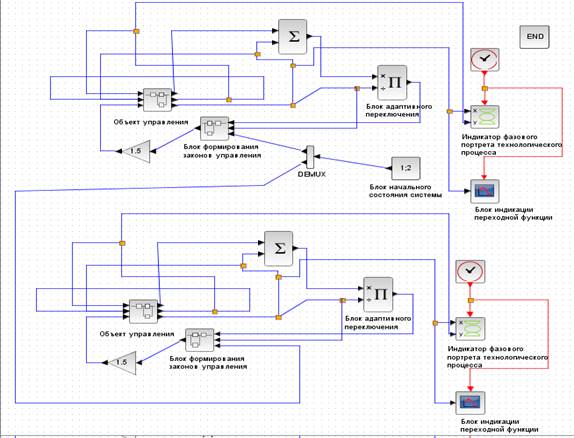
Рисунок 2 – Математическая модель с переменной структурой
Время решения задачи моделирования установлено, равным t = 60с.
Результаты моделирования представлены фазовыми портретами исследуемой системы с переменной структурой и графиком переходной функции (характеристики), изображенными на рисунках 3 и 4.
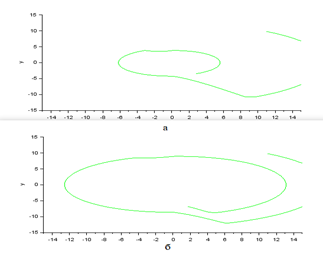
Рисунок 3 – Фазовые портреты исследуемой системы. А. 1-го и 2-го каналов Б. 3-го и 4-го каналов

Рисунок 4 – Переходные функции исследуемой системы:
А. 1-го и 2-го каналов,
Б. 3-го и 4-го каналов
Таким образом, представленный способ исследования отличается от других способов простотой и достоверностью, что может вызвать интерес у проектировщиков сложных технических систем.
Список литературы:
1. Глибин, Е.С. Моделирование источников питания электротехно- логических установок в Scilab Xcos : лабораторный практикум /Е.С. Глибин. – Тольятти : Изд-во ТГУ, 2016 – 1 оптический диск.
