Урожайность сельскохозяйственных плодовых культур во многом зависит от способа и качества механической обработки почвы, один из основных показателей которого – степень крошения. При использовании плугов и плоскорезов она изменяется от 35 до 70 % [1, с. 55]. Однако, вероятность получения необходимого значения (80%) не превышает 20,4% из-за значительного варьирования физико-механических свойств почвы [2, с. 4].
Второй важный показатель физического состояния почвы – плотность, оптимальное значение которой для обрабатываемого слоя чернозема в районах плодовых культур составляет 1,1-1,2 г/см3. Превышение этого значения или чрезмерная рыхлость приводит к снижению урожайности садов [3, с. 12]. Очень важно под каждую культуру создавать оптимальную плотность почвы за меньшее число проходов агрегата. Каждое последующее крошение почвенных комков связано с увеличением энергозатрат на обработку [4, с. 2]. Они определяются главным образом видом разрушающих деформаций, который в свою очередь зависит от геометрических и технологических параметров, кинематики рабочих органов и физико-механических свойств почвы.
Изучение процесса взаимодействия почвы с рабочими органами позволило установить, что лучшее качество и меньшая энергоемкость процесса получаются при использовании переменной кривизны их рабочей поверхности [5, с. 3]. Причем ее нижняя часть должна быть вогнутой, а верхняя выпуклой. При движении по такому рабочему органу почва испытывает сначала деформацию на сжатие, потом на растяжение. Для оперативного управления процессом выпуклая рабочая поверхность должна иметь возможность изменения угла установки относительно нижней вогнутой части [6, с. 3].
Для достижения требуемого качества обработки почвы необходимо определить положение дополнительных устройств (ворошителей) относительно основного рабочего органа и стойки в зависимости от конкретного состояния почвы.
Для выбора параметров ворошителей принимаем изначально несколько форм дополнительных устройств: плоскость с прямолинейными границами (треугольник), плоскость с криволинейными выпуклыми границами, плоскость с криволинейными вогнутыми границами, плоскость с переменной кривизной границ (вогнуто-выпуклые границы), плоские дисковые вращающиеся ворошители [7, с. 3]. При взаимодействии с почвой каждый из этих ворошителей по-разному воздействует на двигающиеся по ним частицы почвы, так как динамика абсолютной скорости движения частицы почвы по разным типам поверхностей неодинакова. В тоже время на элементарном пути ds при любой форме поперечного сечения стойки движение частицы почвы можно представить как движение её по поверхности трёхгранного клина.
Учитывая вышеизложенное, предлагаем изготовить стойку плоскореза с криволинейной передней поверхностью для снижения сопротивления почвы движению рабочего органа, а также с целью улучшения крошения почвы установить ворошители на лезвие в виде дисков, которые в отличие от ворошителей клиновидной формы имеют более низкое сопротивление, т.к. сила трения качения имеет меньшее значение по сравнению с силой трения скольжения.
Сопротивление движению рабочего органа в рабочей среде со стороны почвы складывается из суммы сопротивлений долота, стойки, треугольной лапы и дисковых ворошителей.
Академик В. П. Горячкин пришел к выводу, что при равномерном движении рабочего органа почвообрабатывающего орудия необходимую силу тяги можно представлять слагающейся из трех составляющих:
Р=Р1+Р2+Р3, (1)
где Р – сила тяги почвообрабатывающего орудия;
Р1 – сила для преодоления сопротивлений трения почвообрабатывающего орудия по поверхности поля при его движении;
Р2 – сила, требующаяся для сообщения деформаций почве;
Р3 – сила, необходимая для сообщения скорости почве, непрерывно поступающей на рабочую поверхность.
Имеют практическое приложение некоторые варианты формулы В. П. Горячкина, более детально описывающие процесс и дающие возможность установить пути и способы уменьшения сопротивлений.
Процесс подрезания и отбрасывания почвенного пласта плоскорежущими полулапами характеризуется дальностью Lx его полета и высотой Lz подъема над дном борозды, которые определяются известными законами криволинейного движения материальной точки, брошенной под углом к горизонту.
Уравнения движения частиц пласта будут иметь вид:
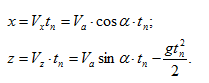
При движении пласта по поверхности лапы и после схода с нее частицы имеют динамические силы (силы инерции). Если диск расположен от лапы на расстоянии большем, чем дальность схода пласта, эти силы не будут оказывать положительного действия на работу диска. И, наоборот, при небольшом расстоянии между ворошителем и лапой движущийся пласт находит на диск, и эти силы будут способствовать лучшему вращению диска. Крошение почвы в этом случае будет лучшее.
Список использованных источников:
- Горовой, С.А. Обоснование параметров рабочего органа плуга чизельного для обработки почвы в междурядьях садов предгорной зоны Северного Кавказа: Дис. канд. техн. наук: 05.20.01 / Горовой Сергей Алексеевич. – Краснодар, 2011.
- Gorovoy S. A. Research of the process of soil cultivation by use of the zero tillage tool with a bent stand / S. A. Gorovoy / British journal of innovation in science and technology. – 2017. – V. 2. – № 1. – С. 5-12.
- Горовой С. А. Обоснование параметров рабочего органа плуга чизельного для обработки почвы в междурядьях садов предгорной зоны Северного Кавказа: автореф. дис. … канд. техн. наук. Краснодар, 2011. 23 с.
- Патент РФ № 2463766, A01D41/12. Устройство для разбрасывания соломы к зерноуборочному комбайну / В. Д. Карпенко, Л. В. Коваленко, С. А. Горовой и др.; патентообладатель ФГОУ ВПО Кубанский ГАУ; опубл. 20.10.2012.
- Патент РФ № 2407257, А01В 35/00, А01В35/20. Устройство для обработки почвы / Б. Ф. Тарасенко, А. Н. Медовник, С. А. Чеботарёв М. И. и др.; патентообладатель ФГОУ ВПО Кубанский ГАУ; опубл. 27.12.2010.
- Патент РФ № 2436270, А01В63/112, 5/13. Полевая установка для испытаний почвообрабатывающих рабочих органов / Б. Ф. Тарасенко, Н. И. Богатырёв, А. Н. Медовник и др.; патентообладатель ФГОУ ВПО Кубанский ГАУ; опубл. 20.12.2011.
- Патент РФ № 2404558, A01B35/00. Устройство для безотвальной обработки почвы / Б.Ф. Тарасенко, А.Н. Медовник, В. А. Дробот и др.; патентообладатель ФГОУ ВПО КубГАУ; опубл. 27.11.2010.
