Задачей предполагаемого технического решения является расширение функциональных возможностей бионических протезов или экзоскелетов для людей с ограниченными возможностями, а также для управления различного рода манипуляторами.
Реализация поставленной задачи за счет использования комбинации датчиков, регистрирующих физиологические сигналы различной природы с мышц. Используя сигналы разной природы, в данном случае механическую и электрическую активность можно увеличить информативность сигнала, в следствии чего приблизиться к управлению элементами искусственной конечности естественным для человека способом. [1]
Разработанное устройство представлено на рисунке 1.
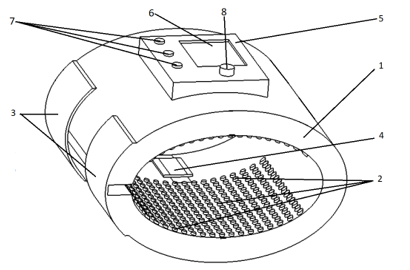
Рисунок 1. Регистратор физиологических сигналов двигательной активности мышц
Основой устройства является гибкая манжета 1, с внутренней стороны которого встроена матрица пьезодатчиков 2, регистрирующих механическую активность мышц, степень плотного контакта к поверхности руки которых осуществляется посредством текстильной застежки 3, два ЭМГ датчика 4 закрепленные с внутренней стороны манжеты, регистрирующих электрическую активность мышц, блок управления 5 для сбора, обработки, хранения и передачи информации, полученной с матрицы пьезодатчиков 2 и ЭМГ датчиков 4, закрепленный на внешней стороне гибкой манжеты 1, дисплей 6 и клавиатура 7 с энкодером 8 встроенные в блок управления 5, который работает от источника питания (на рисунке не показан) .
Описание работы устройства для управления бионическим протезом.
Культю помещают в гибкую манжету 1 и закрепляют при помощи застежек 3 таким образом, чтобы обеспечить плотный контакт поверхности кожи культи пользователя с поверхностью датчиков 2 и 4. Затем включают питание блока управления 5. При помощи энкодера 8 задают режимы работы устройства: «настройка» или «работа». Вся информация по настройкам и выбору параметров работы отображается на дисплее 6. Кратковременным нажатием энкодера 8 пациент активирует режим «настройка» и начинает выполнять последовательно однотипное движение (далее паттерн), например, изометрическое сокращение мышц, соответствующих сгибанию-разгибанию пальца и всей кисти руки в течении времени, необходимого для настройки и сохранения в памяти выполняемого паттерна. При этом время для настройки определяется индивидуально с возможностью изменения длительности выполнения однотипных движений при повторной настройке. При активации режима «настройка» начинается регистрация сигналов со всех датчиков в памяти блока управления 5, а именно, регистрируемые механические сигналы, возникающие в результате сокращения мышц, с пьезодатчиков 2 и электрические сигналы с ЭМГ датчиков 4, которые поступают в блок управления 5, где обрабатываются в режиме реального времени. В результате в памяти блока 5 сохраняется массив данных, содержащий все выполненные паттерны изометрических движений мышц, соответствующих сгибанию-разгибанию пальца и всей кисти руки. Выявление всех возможных паттернов движений будет зависеть от степени ампутации, а также от степени атрофии групп мышц пациента. В режиме «работа» блок управления 5 использует обработанный и сохраненный поток зарегистрированных сигналов для формирования управляющих команд на исполнительные элементы бионического протеза руки. При этом анализатор мышечной активности в блоке управления 5 производит сравнение сохраненных сигналов для каждого отдельного паттерна с сигналами, формирующимися пользователем в режиме реального времени, и в случае совпадения сигналов анализатор активирует соответствующие исполнительные механизмы бионического протеза руки. Таким образом сохраненную в блоке 5 информацию можно использовать в качестве управляющих команд для управления исполнительными механизмами бионического протеза.
В качестве материала для манжеты анализатора мышечной активности, а также покрытия его датчиков необходимо использовать по возможности инертные нетоксичные достаточно гибкие материалы, например: силикон, синтетические полимеры акрилаты, материалы на основе композита из углерода и карбида кремния, матрицы из целлюлозы и ее производных.
Для создания внутренней формы манжеты под необходимый рельеф поверхности культи могут использоваться два метода:
– 3D сканирование культи;
– выполнение слепка культи из заранее подготовленного материала для изготовления культеприемных гильз.
Предпочтительнее использовать метод 3D сканирования, так как в дальнейшем можно получить готовую 3D модель культи, обработать ее и подготовить к печати на принтере манжету с внутренней поверхностью соответствующей поверхности 3D модели культи. Печать может быть выполнена на 3D принтере, например, из Flex-полимера. Гибкую манжету 1 можно как устанавливать в культеприёмную гильзу протеза, так и совмещать с ней.
Список литературы:
- Andrey N. Afonin, Andrey Yu. Aleynikov 1, Marina Yu. Nazarova 1, Andrey R. Gladishev, Anastasiya V. Gladisheva, 2018. Bionic hand prosthesis with an improved muscle activity analyzer. Journal of Biointerface Research in Applied Chemistry8 (5), с. 3514-3517
