Кран 1 движется по алюминиевым рельсам 2 с помощью направляющих 3 по оси Y. Конструкция представлена на рисунке 1. В направляющих, имеющих п-образный вид установлены колесики из металла, которые и осуществляют передвижение по рельсам.
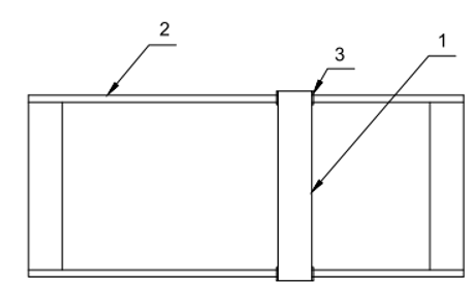
1 – кран; 2 – рельсы; 3 – направляющие
Рисунок 1 – Система передвижения крана в длину (вид сверху)
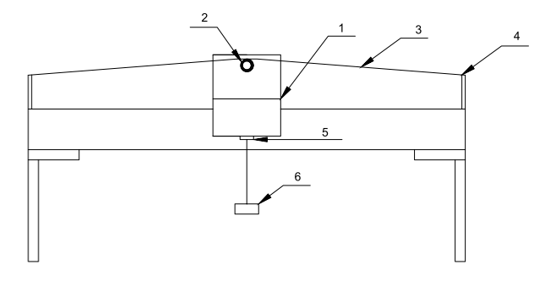
Движение по оси Y (вдоль стены) происходит следующим образом. Шаговый двигатель № 2 через зубчатую передачу приводит в движение барабан 2, расположенный в верхней части крана. Барабан наматывает нить 3, закреплённую по двум сторонам крана. Конструкция представлена на рисунке 3.
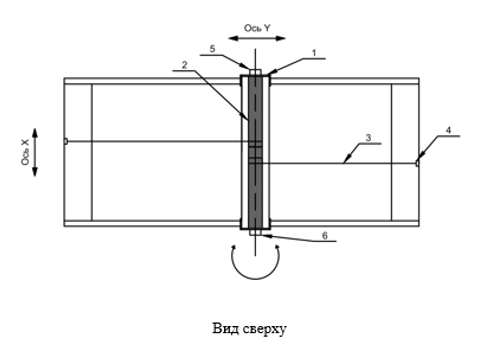
1 – кран; 2 – барабан; 3 – капроновая нить; 4 – крепление нити; 5 – двигатель №1; 6 – двигатель № 2
Рисунок 2 – Конструкция привода перемещения По оси Y
Привод перемещения по оси X (поперек стены) (рисунок 4) устроен следующим образом. Он по принципу схож с перемещением по оси Y, но противоположен по конструкции. На валу ШД 6 установлен барабан 2. На него намотана капроновая нить 3, которая продета через ролики 1 на концах крана. Концы нити, жестко закреплены на каретке 4 крана. При вращении ШД за счет натяжения нити каретка приводится в движение. Каретка скользит по трубчатым направляющим 5.
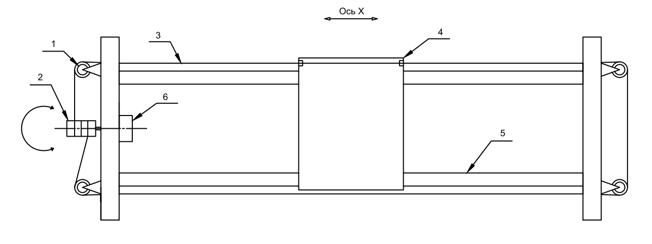
1 – ролик; 2 – барабан; 3 – капроновая нить; 4 – каретка; 5 – трубчатые направляющие; 6 – ШД №1
Рисунок 3 – Конструкция привода перемещения по оси X (вид сверху)
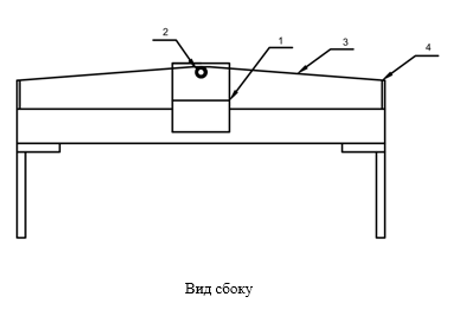
Привод подъема реализован на ДПТ и червячном редукторе. Вал ДПТ соединен с валом червяка, а барабан подъема груза к зубчатому колесу. На барабане намотана капроновая нить, на конце которой подвешен электромагнит. Конструкция представлена на рисунке 4.
1 – кран; 2 – барабан; 3 – капроновая нить; 4 – крепление нити; 5 – двигатель №3; 6 – электромагнит
Рисунок 4 – Конструкция привода подъема груза
Структурная схема системы позиционирования на основе ШД представлена на рисунок 5.

Рисунок 5 – Структурная схема системы позиционирования на основе ШД
Программируемый логический контроллер (ПЛК) через дискретные модули выхода управляет драйвером шагового двигателя. К драйверу подключается гибридный шаговый двигатель с 2 фазами. Достоинством данной системы является простота реализации с достаточной точностью перемещения. Исходя из условия, что в механизме привода нет люфтов и механизм не проскальзывает, можно утверждать, что на единичный импульс с ПЛК модель перемещается на установленное расстояние. Тем самым нет необходимости в датчике обратной связи. Данные системы хорошо себя зарекомендовали в простых системах позиционирования в различных приборах.
Литература
- Зерцалов А. И. Краны с жестким подвесом груза [Текст] / А. И. Зерцалов. – М.: Машиностроение, 1979 г.
- ГОСТ 25835-83 «Краны грузоподъемные. Классификация механизмов по режимам работы».
- Принцип действия двигателя постоянного тока [Электронный ресурс]. – Электрон. дан. – Режим доступа: http://podvi.ru/elektrodvigatel/podrobnoe-opisanie-principa-dejstviya-dvigatelya-postoyannogo-toka.html
- Емельянов, А.В. Шаговые двигатели: учебное пособие. [Текст] / А.Н Шилин, А.В.Емельянов, ВолгГТУ. – Волгоград, 2005.
References
[1] Zercalov A. I. Krany s zhestkim podvesom gruza [Tekst] / A. I. Zercalov. – M.: Mashinostroenie, 1979 g.
[2] GOST 25835-83 «Krany gruzopod#emnye. Klassifikacija mehanizmov po rezhimam raboty».
[3] Princip dejstvija dvigatelja postojannogo toka [Jelektronnyj resurs]. – Jelektron. dan. – Rezhim dostupa: http://podvi.ru/elektrodvigatel/podrobnoe-opisanie-principa-dejstviya-dvigatelya-postoyannogo-toka.html
[4] Emel’janov, A.V. Shagovye dvigateli: uchebnoe posobie. [Tekst] / A.N Shilin, A.V.Emel’janov, VolgGTU. – Volgograd, 2005.
