1. Введение
МСС – это метод диагностики, мониторинга целостности гражданских строений, таких как мосты, самолеты и т.д. не оказывающий воздействия на постройки. Постепенное разрушение конструкций может происходить по разным причинам, таким как постоянное воздействие ненастной погоды,
перегрузки и т.п. Реализация МСС является жизненно необходимым инструментом в старых сооружениях для обеспечения безопасности людей. Хотя исследователи из разных областей науки пробовали различные подходы к МСС, большая часть работ в этой области была выполнена с использованием гражданских инженеров и инженеров-механиков. Эти работы опираются, в основном, на анализ собственных частот строений, для принятия решения. Однако в данной работе выбран иной подход. Была разработана методика анализа сигналов (электрических) и ее реализация на встроенной платформе.
Первое, что необходимо для выполнения МСС, это собрать данные с помощью датчиков. Различные типы датчиков, такие как ультразвуковой [1], пьезоэлектрический [2], [3], [4], [5], и т.д. могут использоваться в МСС для генерации сигналов, проходящих через твердые конфигурации. Позже, данные, собранные с датчиков, должны быть проанализированы с применением различных методов обработки сигналов, т. к. незначительные изменения внутри строения, вызванные различными факторами, например, шумы, перепады температуры, воздействия окружающей среды могут вызвать значительные изменения в реакции со стороны датчиков, скрывающие потенциальные изменения сигнала из-за дефектов структуры строения [6]. Для улучшения производительности МСС используются различные методы обработки сигналов, такие как подавление небольших шумов (Wavelet denoising), быстрое преобразование Фурье (FFT), вейвлет-преобразование, кросс-корреляции (КК), анализ основных компонентов (Principal Component Analysis (PCA)) и др. Вейвлет-анализ может быть использован для удаления шума из сигнала [7] и обнаружения повреждений в конструкции [6]. Быстрое преобразование Фурье [8], [9] и вейвлет-преобразование [3] обычно используется для получения частотного спектра выходного сигнала датчиков, и эти спектры также могут помочь спроектировать соответствующий фильтры для удаления шумов. С другой стороны, крос-корелляция-это степень сходства между двумя сигналами. В МСС сравниваемые сигналы это: базовый (эталонный) сигнал и сигнал, получаемый в реальном времени. Еще один полезный метод обработки сигналов, используемый в МСС – это PCA, который использует ортогональное преобразование для установления линейной зависимости между входом и выходом. То линейное соотношение “вход-выход”, разработанное для целевого объекта, может быть использовано для МСС. Использование управляемых волн, таких как волна Лэмба, которая может проходить через структуру, становится все более распространенным среди исследователей [2], [3], [4], [5]. Если в конструкции есть повреждения, волны Лэмба будут отражаться или рассеиваться этими повреждениями. Для определения повреждения, принимается сигнал разности и сравнивается с базовым сигналом. Для локализации повреждений объекта, ключевым процессом является получение периода следования и амплитуды отклика на сигнал. Период следования этой управляемой волны линеен и находится в прямой зависимости от свойств материала, таких как его модуль упругости и модуль жесткости. В этой статье предлагается полная платформа МСС на основе ИВ. Для удаления шума используется простой фильтр Баттерворта. Данная математическая модель используется для определения местоположения и размера повреждений, если таковые имеются. Для хранения информации, получаемой МСС в реальном времени, используется платформа ThingWorx.
2. Подобные работы
Лианг и соавторами была рассмотрена проблема отказа датчиков в крупной сенсорной сети и предложен метод самодиагностики и самостоятельной реконфигурации для МСС, который был проверен путем проведения экспериментов на реальной платформе мониторинга с алюминиевой пластиной и соединением привод / датчик [11]. С другой стороны, Парком с соавторами рассмотрены проблемы использования более старого базового сигнала для МСС. Предложена методика использования мгновенных базовых сигналов для сравнения с сигналом, получаемым в реальном времени, при принятии решения МСС. Для анализа сигналов использовались методы вейвлет-преобразования и кросс-корреляции [12]. В [2], [3], [4], [5], пьезоэлектрическая (PZT) пластина для МСС использовалась с различными методами обработки сигналов. Однако были некоторые проблемы с определением размера повреждений. Жанг с соавторами использовали PCA для устранения воздействия на окружающую среду от сигнала. Для работы с данными SHM использовался интернет вещей. Однако предложенная ими методика не включала в себя определение места повреждения или степени тяжести повреждения [13]. Хуо с соавторами предложена система, использующая комбинацию амплитуды кросс-корреляционной функции (CCFA) и машины опорных векторов (SVM) для определения состояния структуры [14]. Данные бенчмарка IASC-ASCE использовались для выполнения численной верификации системы, и эта верификация была проведена с помощью MATLAB. Кроме того, для экспериментальной проверки был проведен вибрационный эксперимент ферменной конструкции. Гера и др. проанализировали данные, предоставленные целевой группой Американского Общества Гражданских Инженеров для четырехэтажного здания по предложенной ими методике МСС. Этот метод включал использование вейвлет-анализа и обнаружение повреждений по всплескам в вейвлет-деталях. Для определения местоположения пораженного участка [15] были использованы узоры (закономерности) пространственного распределения пиков. В работе [1] обнаружение повреждений базировалось на основе вейвлет-преобразования Габора. В работе [16] неопределенность разрешалась с помощью Байесовской теории вероятности для модели, основанной на МСС, где структурные модели были идентифицированы из модальных данных. Производительность этого алгоритма в реальном времени была неизвестна, так как предложенная ими система не была протестирована на реальном оборудовании. Более того, такой подход не годится для крупного ущерба [16]. В работе [17] неопределенность системы также рассматривалась Джианг с командой. Полученные модальные параметры из отклика строения на вибрацию были использованы в качестве входных данных Системы нечеткой нейронной сети (FNN), а выходные данные из трех различных конфигураций FNN использовались в качестве входных данных для центра слияния данных. Используя слияние, неопределенность модальных данных была сведена к минимуму. Эта статья посвящена доступности информации МСС удаленно. Т.к. ИВ – глобальная сеть интеллектуальных объектов- становится крупным исследовательским интересом в настоящее время, эта платформа была использована для обеспечения удаленного доступа к данным.
3. Предлагаемая математическая модель
В данной модели используются два датчика (ПЗТ), которые способны генерировать, а также принимать сигналы. Генерируемый ПЗТ1 сигнал проходит через структуру, и ПЗТ2 получает раздельно совмещенный сигнал, как показано на рис.1. Когда сигнал отражается на гранях, он возвращается в ПЗТ1 (импульсное Эхо) [18]. Скорость волны сигнала, генерируемого PZT1, и путь сигнала обратно к PZT1, должны быть определены, ![]() может быть определено как:
может быть определено как:
![]()
L – расстояние между двумя ПЗТ датчиками , и ![]() – разница времени между пиками. Используя местоположение повреждения L можно определить с помощью соотношения (2).
– разница времени между пиками. Используя местоположение повреждения L можно определить с помощью соотношения (2).
![]()
После расчета положения следующим шагом будет определение ширины повреждения. Во-первых, отношение положения повреждения к общей длине ![]() , можно определить по формуле:
, можно определить по формуле:
![]()
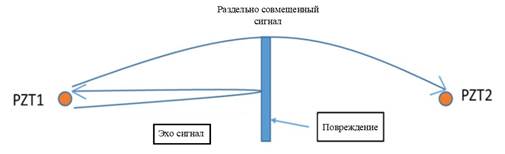
Рис 1. Предполагаемая концепция
Из-за наличия повреждения волна затрачивает больше времени на путь от возбудителя до датчика, что означает, что волна проходит большее расстояние. Это расстояние, H, может быть определено:
![]()
Где ![]() – общее время прохождения волны от возбудителя до датчика при наличии повреждения. Из этих уравнений можно сделать треугольник, как показано на рис. 2.
– общее время прохождения волны от возбудителя до датчика при наличии повреждения. Из этих уравнений можно сделать треугольник, как показано на рис. 2. ![]() это основание, а
это основание, а ![]() – гипотенуза этого треугольника.
– гипотенуза этого треугольника. ![]() и S очень близки по значению и равны только в том случае, если
и S очень близки по значению и равны только в том случае, если ![]() равно 1/2. Тогда как
равно 1/2. Тогда как ![]() можно определить, используя следующее соотношение:
можно определить, используя следующее соотношение:
![]()
![]()
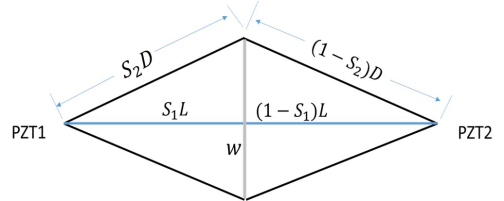
Рис.2 Математическая модель
Эти соотношения используются, если повреждение имеет одинаковую ширину выше и ниже оси.
4. Фильтр Баттерворта
Для устранения шума фильтр, который используется в этой работе, является Баттервортовским, т.к. этот тип фильтров имеет лучший компромисс между затуханием и фазовым откликом по сравнению с Чебышевским и эиптическими фильтрами, так как здесь нет никаких пульсаций в полосе пропускания, ровно как и в полосе затухания. Если фильтр имеет нный порядок, то коэффициенты передаточной функции будут обладать н+1 порядком для фильтра высоких или низких частот. С другой стороны порядок будет 2н+1 для полосовых фильтров. Баттервортовский фильтр, использующийся в данной работе, имеет 6-й порядок и является фильтром нижних частот. Если c и d – коэффициенты передаточной функции H(z), то передаточная функция может быть выражена выражением (7). Эта передаточная функция определяет какие компоненты сигнала будут пропущены.

5. Предложенная МСС система
Для контроля состояния структуры предлагается сочетание методов раздельно совмещенного сигнала и импульсного эха. Эта комбинация также позволит нам определить место повреждения и его размер. Метод раздельно совмещенного сигнала использует два датчика ПЗТ; один в качестве передатчика или привода (PZT1), а другой в качестве приемника (PZT2). Генерируемый PZT1 сигнал затрачивает больше времени для достижения PZT2 в случае наличия повреждений. Этот принцип используется для построения математической модели, позволяющей получить размер повреждений. С другой стороны, метод импульсного эха использует один датчик PZT в качестве передатчика, а также приемника. Задержка принятого сигнала используется для определения места повреждения. Импульсное эхо – это метод идентификации повреждений, при котором короткие волны передаются в исследуемую область, а отраженные сигналы (Эхо), возникающие в результате рассеяния и отражения, обнаруживаются и отображаются.
На рис. 3. показана блок схема алгоритма предлагаемой системы. В этом алгоритме, как для методов импульсного эха, так и для методов улавливания высоты тона, необходимо определить пороги задержек принимаемых сигналов. Для метода импульсного эха, наличие задержка dt1 ниже определенного порога означает, что в структуре(объекте) есть повреждение. С другой стороны, если есть какие-либо повреждения конструкции, задержка приема сигнала для техники раздельно совмещенного сигнала будет выше, чем определенная задержка, dt2.
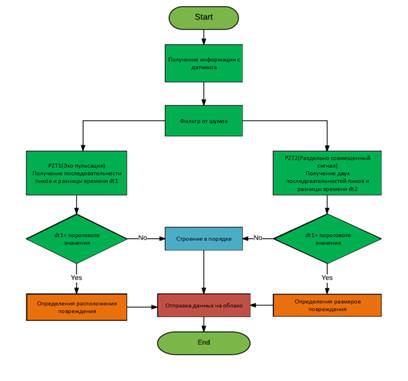
Рис.3
На рис. 4. показана архитектура аппаратного обеспечения, предложенная в данной работе. MCP3008 подключается к Raspberry Pi с помощью шины последовательного периферийного интерфейса (SPI), которая может обеспечивать синхронную последовательную связь. Взаимодействие между Raspberry Pi и MCP3008 можно увидеть на рис. 5.
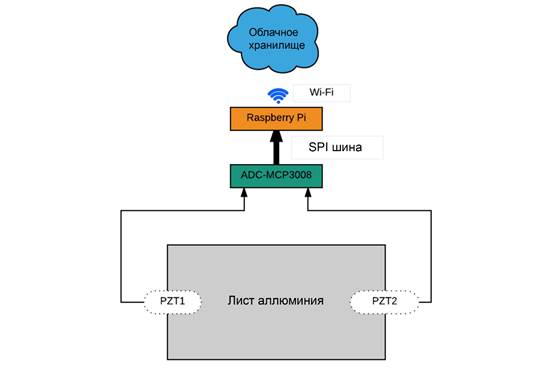
Рис.4 Структурная схема системы
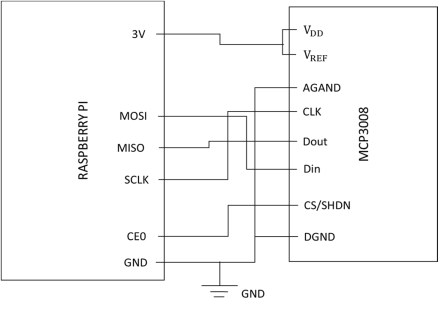
Рис.5 Интерфейс RASPBERRY PI и MCP3008
Функциональные генераторы используются для имитации сигналов, генерируемых для алюминиевых листов ПЗТ приводом/датчиком. Функциональные генераторы продолжительно генерировали сигналы. Позже эти сигналы подаются на вход аналого-цифрового преобразователя MCP3008 (АЦП), а выходы этого АЦП считываются с помощью Raspberry Pi. Данные сохраняются в a .txt файл и сразу же открыты для обработки. Сначала система запускает цифровой буфер для фильтрации шума, используя фильтр Баттерворта. Таким образом получаются чистые сигналы. Позже отфильтрованные сигналы пропускаются через алгоритм обнаружения пиков, чтобы найти пики и соответствующие им время. Эти пиковые периоды используются для определения наличия повреждений, и, если какие-либо повреждения обнаружены, применяется математическая модель для определения местоположения и размера повреждений. Наконец, эти два значения размера и местоположения загружаются в интернет для удаленного мониторинга.
6. Результат
Для верификации предложенной архитектуры, а также алгоритма были проведены экспериментальные установки по методу раздельно совмещенного сигнала путем генерации сигналов с использованием функциональных генераторов. Шумы к этим сигналам добавлялись с помощью других функциональных генераторов. Для метода импульсного Эха потребуется такая же установка.
А. Отсутствие повреждений в конструкции
Порог задержки (между базовым сигналом и сигналом реального времени) зависит от различных факторов, таких как материал конструкции, расстояние между приводом и датчиком, качество используемых датчиков PZT и т. д. При этом пороговое значение принималось равным 1 мс. Сигнал канала 1 рассматривался как базовый сигнал, а сигнал канала 2-как сигнал реального времени. На рис. 6. показано, что сигнал канала 1 и канала 2 практически перекрывается и таким образом проявляется в облаке (рис. 7), что показывает, что не было никаких повреждений конструкции.
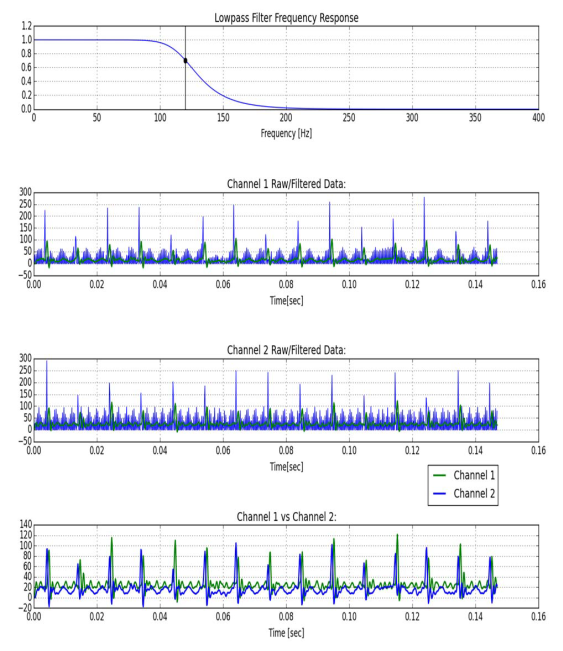
Рис.6 Гармоники основного сигнала и сигнала в реальном времени
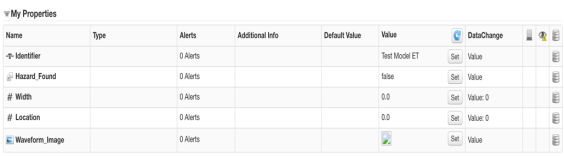
Рис.7 Скриншот окна ThingWorx
B. С повреждением
Тестирование было проведено с целью проверить, что при наличии задержки между базовый сигнал и сигнал реального времени выше порога, система может обнаружить аномалию (повреждение), и высчитать размер ущерба. (Предполагалось, что с помощью математической модели уже известно место повреждения, которое находилось в 407,7 мм от привода по направлению к датчику). Из Рис. 8 видно, что задержка между сигналом от канала 1 и канала 2 была выше порога, это же видно на странице ThingWorx (рис. 9), “Hazard Found: true”. Кроме того, расчетное местоположение и размер повреждений можно увидеть на рис. 8.
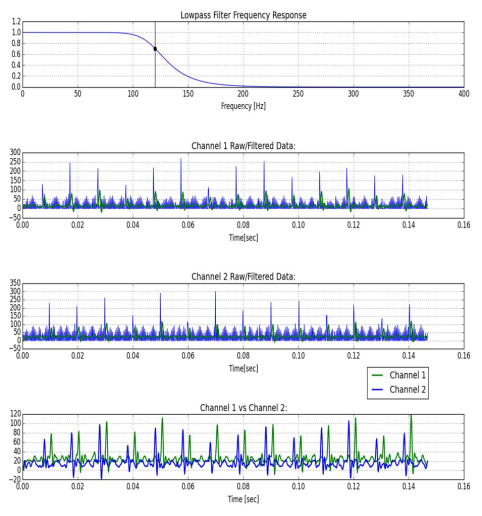
Рис.8 Гармоники основного сигнала и сигнала в реальном времени
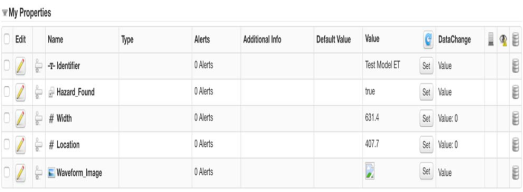
Рис.9 Скриншот окна ThingWorx
7. Заключение
Поскольку ИВ постепенно меняет то, как мы привыкли взаимодействовать с различными устройствами, а также приложениями, преимущества ИВ ценятся исследователями из разных дисциплин. В этой работе была предложена аппаратная платформа СЗМ с ней. Аппаратная архитектура состояла из raspberry pi, АЦП и модуля Wi-Fi. В предложенной системе был реализован простой метод обработки сигналов с малым количеством математических расчетов, который использовал фильтр Баттерворта (для удаления шумов) и математическую модель (для получения местоположения/размера повреждения). Позже данные передавались в Интернет для удаленного доступа.
