1. Введение
Внимание экспертов всегда было сосредоточено на пространственных явлениях, таких как: проблемы со столкновением, оптимизация топлива, гравитационные маневры и т. Д., Эти исследования были успешными благодаря математическому моделированию. Понятно, что эта задача была непростой из-за ряда проблем, связанных со сложностью математического описания относительного движения космических аппаратов, то есть при создании математических моделей, которые могли бы описать относительное движение этих космических аппаратов. В 1960 году Клохесси и Уилтшир создали математическую модель, которая могла бы описать относительное движение космических аппаратов вблизи круговых орбит [1, 2]. Эти уравнения были позднее модифицированы Хиллом, поэтому сегодня они называются HCW (Хилл-Клохесси-Уилтшир) [4, 18, 19].
В работе Хилла и других ученых отсутствует подход к компонентам возмущающих сил, то есть они не анализировали случай, когда один из компонентов этих возмущающих сил равен нулю, поэтому в данной статье автор рассмотрит этот частный случай, когда составляющая возмущающих сил x равна нулю.
2. Постановка задача
Для анализа движения двух космических аппаратов по орбитам, близким к Земле, автор ввел орбитальную систему координат. Рассмотрим два космических аппарата (Ангосат-3 и Angospace), но Angospace (целевой космический аппарат), движущийся по орбите радиуса ![]() , повторяющих вокруг Земли. Космический аппарат – Ангосат-3 (маневрирующий космический аппарат), движущийся по другой орбите с радиусом
, повторяющих вокруг Земли. Космический аппарат – Ангосат-3 (маневрирующий космический аппарат), движущийся по другой орбите с радиусом ![]() .
.
Необходимо найти аналитическое решение математической модели, которая описывает движение этих двух космических аппаратов по орбитам, близким к Земле, чтобы приблизиться к их положениям и скоростям.
3. Математическая модель
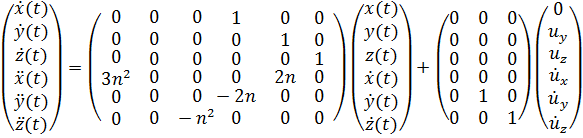
В качестве математической модели рассмотрим систему дифференциальных уравнений второго порядка (модель Клохесси-Уилтшира-Хилла). Тем не менее, давайте рассмотрим, что уравнения Клохесси-Уилтшира-Хилла линеаризуются, и что мы проанализируем частный случай, то есть когда составляющая возмущающей силы на оси ![]() равна нулю (
равна нулю (![]() ).
).
Для решения задачи, представленной на рисунке 1, автор представляет систему координат Хилла, связанную с Angospace (целевой космический аппарат) и Ангосат-3. Ось x направлена вдоль вектора радиуса Angospace в одной тоже направление, ось y направлена вдоль вектора скорости Angospace (целевой космический аппарат), а ось z перпендикулярна целевого космического аппарата.
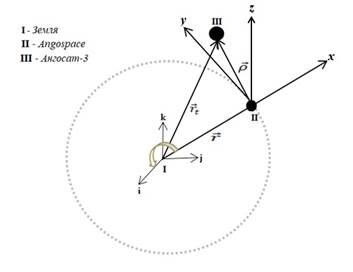
Рис. 1. Система координат Хилла.
Поскольку целевой космический аппарат (Angospace) находится на круговой орбите, ![]() и
и ![]() являются постоянными, таким образом, согласно Bate et. и др. (1971).
являются постоянными, таким образом, согласно Bate et. и др. (1971).
![]() (1)
(1)
Где: ![]() – угловая скорость (среднее движение),
– угловая скорость (среднее движение), ![]() – стандартный гравитационный параметр Земли,
– стандартный гравитационный параметр Земли, ![]() ,
, ![]() – расстояние от центра масс Земли до Ангосата-3,
– расстояние от центра масс Земли до Ангосата-3, ![]() – расстояние от центра масс Земли до Angospace и
– расстояние от центра масс Земли до Angospace и ![]() – относительное расстояние между Ангосат-3 и Angospace.
– относительное расстояние между Ангосат-3 и Angospace.
Таким образом, можно записать уравнения Хилла-Клохесси-Уилтшира следующим образом:
![]() (2)
(2)
![]() (3)
(3)
![]() (5)
(5)
В этой статьи рассматривается случае, когда ![]() , то есть:
, то есть:
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
4. Метод преобразования Лапласа
Обычное дифференциальное уравнение – это уравнение, которое включает функцию переменной и ее производных:
![]() (9)
(9)
Если дифференциальные уравнения дополняются начальными условиями, то они называются задачей начальных значений.
Преобразование Лапласа предоставляет методологию для решения и анализа задач, включающих обыкновенные дифференциальные уравнения, а также системы обыкновенных дифференциальных уравнений.
![]() (10)
(10)
Метод преобразования Лапласа состоит в использовании преобразования Лапласа для преобразования дифференциального уравнения в простую задачу через свойства преобразования Лапласа. Как правило, в линейных уравнениях постоянных коэффициентов (дифференциальные уравнения модели HCW) преобразуются в алгебраические уравнения, в которых нужно просто изолировать полученное неизвестное, и с помощью повторения обратных преобразований Лапласа мы найдем исходное решение.
4.1. Свойства преобразования Лапласа производной
Аналогично, если ![]() – они непрерывны и
– они непрерывны и ![]() непрерывен по частям тогда:
непрерывен по частям тогда:
 (11)
(11)
Поскольку дифференциальные уравнения модели HCW являются обычными и имеют вторую степень, то из уравнения (11) получаются следующие выражения:
![]() (11a)
(11a)
![]() (11b)
(11b)
5. Решение уравнений HCW
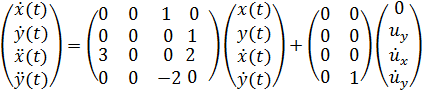
Однако рассматриваемая модель может быть представлена в пространстве состояний как:
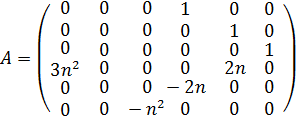
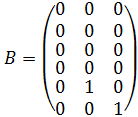
Уравнение (12) можно записать в виде матрицы:
 (13)
(13)
 ;
; 
где: ![]() – вектор состояния;
– вектор состояния; ![]() ,
, ![]() – вектор реактивного ускорения. В этой статье мы рассмотрим, что
– вектор реактивного ускорения. В этой статье мы рассмотрим, что ![]()
Модель HCW представляет собой систему из трех обыкновенных дифференциальных уравнений второго порядка для решения уравнений HCW, важно отметить, что уравнения (6) и (7) связаны друг с другом, поэтому будет удобно разделять движения: вне орбитальной плоскости H-Миру (компонент z) и в орбитальной плоскости RV-Миру (компонент xy), Таким образом, для решения система делится на две подсистемы: одну Каландула (H-Миру) и другую Камбонду (RV– Миру).
5.1. Модель Камбонду для передвижения в RV– Миру
Здесь подсистема представлена четырьмя состояниями, содержащими два входа и два выхода. Это плоское движение, связанная динамика из уравнения. (12) выглядит следующим образом, с вектором состояния ![]() :
:
 (14)
(14)
 ;
; 
где: ![]() обозначают положение и
обозначают положение и ![]() скорость соответственно.
скорость соответственно.
Таким образом, используя метод преобразования Лапласа для модели Камбонду, мы имеем:
 (15)
(15)
Автор сформирует систему из двух уравнений, для ее решения будет использовать метод подстановки (изолировать Y(s) во втором уравнении и подставить в первое уравнение той же системы), будет иметь вид:
![]() (16)
(16)
![]() (17)
(17)
Чтобы найти общее решение этой модели, будет использовать обратное преобразование Лапласа, например:
![]() (18)
(18)
 (19)
(19)
5.2. Модель Каландула для передвижения в H-Миру
Здесь подсистема представлена двумя состояниями, содержащими вход и выход. Внеплановая динамика из уравнения (12) выглядит следующим образом, с вектором состояния ![]()
![]()
![]()
![]() (20)
(20)
![]() ;
; ![]()
где: ![]() – обозначает положение и
– обозначает положение и ![]() скорость соответственно.
скорость соответственно.
Таким образом, используя метод преобразования Лапласа для модели Каландула, имеет:
![]() (21)
(21)
Уравнение (21) является линейным уравнением в ![]() , то есть
, то есть
![]() (22)
(22)
Чтобы найти общее решение для этой модели, будет использовать обратное преобразование Лапласа, например:
![]() (23)
(23)
6. Производные уравнений HCW
Производная – это мгновенная скорость изменения функции, то есть
![]() ,
, ![]() и
и ![]() (24)
(24)
Далее автор представит производные уравнений HCW для обеих моделей.
6.1. Для модели Камбонду
![]() (25)
(25) ![]() (26)
(26)
6.2. Для модели Каландула
![]() (27)
(27)
Матрица распространения, предварительно умножающая вектор начальных условий, также называется матрицей перехода состояний для уравнений CW. Эта матрица помечена как ![]() – фундаментальная матрица и изменяется во времени. Тогда можно записаться таким образом:
– фундаментальная матрица и изменяется во времени. Тогда можно записаться таким образом:
 Модель Камбонду
Модель Камбонду
![]() Модель Каландула
Модель Каландула
7. Заключение
В этой статье автор представлял аналитическое решение дифференциальных уравнений Клохесси-Уилтшира-Хилла, для случая, когда составляющая возмущающих сил x равна нулю. В качестве аналитического метода он использовал метод преобразования Лапласа, а также его обратное. Это частный случай, поскольку автор идеализирует, что движение космического аппарата, в котором на него действует возмущающая сила, однако его компонент в x равен нулю, можно идеализировать, что у космического аппарата будет ограниченное движение в зависимости от других компонентов. Это так, поэтому автор рекомендует сделать то же самое с численными методами и графическое представление движения этого космического аппарата. Благодаря этому решению у нас есть открытый путь для продолжения исследования и решения различных проблем, таких как: оптимизация траекторий, проблемы захода на посадку и встречи и т. Д.
8. Список литературы/ References
1. Бейт Р.Р.; Мюллер, Д.Д.; Уайт Дж. Э. (1971). Основы астродинамики. Нью-Йорк, США: Dover.p.455.
2. Клохесси, W. H .; Уилтшир, Р. С. (1960). Терминальная система наведения для спутниковой встречи. Журнал аэрокосмических наук, т. 27, н. 9, стр. 653-659.
3. Фехсе, В. (2003). Автоматическое сближение и стыковка космического корабля. Нью-Йорк, США: издательство Кембриджского университета. П. 517.
4. Джентина, Дж. (2009). Десенволвименто и симуляция похода за Маноброй рандеву и стыковка с платформой Орбитальное восстановление САРА.
5. Клохесси, W. H. и Уилтшир, R.S., «Руководство по терминалу для спутниковой встречи», J. Aerospace Sciences, Vol. 27 (1960), p. 653.
6. Ручинская Е. В. Математическое моделирование управляемого движения космических аппаратов: Дисс. канд. техн. наук: Спец : 05.13.18 / Е. В. Ручинская ; МАТИ . ‒ М .: 2010. – 175 с .
7. Гродзовский Г.Л., Иванов Ю.В. Н. и Токарев, В. В., «Механика космического полета малой тяги», NASA TTF-507, 1969, XIV с.3.
8. Клохесси, W. H. и Уилтшир, R. S., «Система наведения терминала для спутниковой встречи», J. Aerospace Sci., 27 (9), 1960, pp. 653-658. DOI: https://doi.org/10.2514/8.8704.
9. Маринеску, Ал., “Оптимальное орбитальное рандеву с малой тягой”, J. Spacecraft, 13 (7), 1976, с.385-392. DOI: https://doi.org/10.2514/3.27913.
10. Картер Т. и Хуми М. Уравнения Клохесси-Уилтшира, модифицированные для включения квадратичного сопротивления, Дж. Гуид. Control Dyn., 25 (6), 2002, pp.1058-1063. DOI: https://doi.org/10.2514/2.5010.
11. Клохесси, W. H. и Уилтшир, R.S., «Руководство по терминалу для спутниковой встречи», J. Aerospace Sciences, Vol. 27 (1960), p. 653.
