В условиях крупномасштабных земельных преобразований существенно возрастают объемы землеустроительных работ в Российской Федерации, повышаются требования к обоснованию проектных землеустроительных решений.
Научные исследования и практика землеустройства показали, что для принятия управленческих и организационно-хозяйственных решений в области землепользования в настоящее время целесообразно использовать экономико-математические методы, моделирование с решением задач на компьютере. Перечислим некоторые из них
Графический метод, как наиболее простой и наглядный, применяется преимущественно в целях уяснения сущности задач линейного программирования. Данный метод позволяет решать задачи только с двумя неизвестными. Для решения задач с большим числом неизвестных он неприменим, так как графические построения в многомерном пространстве без использования специальных графопостроителей на базе ЭВМ невозможны.
Методика решения задач графическим методом предусматривает следующий порядок действий:
- Постановка задачи. Предполагает словесную формулировку условий задачи и указание функции цели (на максимум или минимум).
- Составление экономико-математической модели задачи. Данный этап решения задачи предусматривает математическую формулировку функции цели и условий задачи в виде системы неравенств.
Форма записи условий задачи в виде системы неравенств называется стандартной.
Геометрически каждое из неравенств представляет собой полуплоскость, которая может быть расположена по ту или иную сторону от распределительной прямой линии [3].
- Вычисление координат точек пересечения граничных прямых и прямых функций цели с осями координат. Вычисление координат осуществляется в следующей последовательности:
– каждое из неравенств, выражающих условия задачи (ограничения), заменяется уравнением. В геометрическом смысле полуплоскость заменяется прямой линией, математически выраженной в виде уравнения;
– в каждом уравнении Х1 приравнивается к нулю (Х1 = 0), и по уравнению рассчитывают Х2 (Х2 в этом случае находится как отношение свободного члена вi к коэффициенту при Х2). Затем Х2 приравнивается нулю (Х2 = 0) и определяется значение Х1.
Полученные таким образом координаты точек пересечения граничных прямых (каждому уравнению соответствует своя прямая) с осями прямоугольных координат Х1 и Х2 заносят в специальную таблицу (табл. 1);
– целевая функция приравнивается к произвольному круглому числу (выражается в виде уравнения) с таким расчетом, чтобы получить координаты точек пересечения ее прямой с прямоугольными осями координат Х1 и Х2 в пределах графика.
Поочередно приравнивая Х1 и Х2 к нулю, как описано выше, вычисляются координаты точек пересечения, которые также заносятся в табл. 1.
Таблица 1. Координаты точек пересечения граничных прямых и прямых функций цели с осями координат Х1 и Х2
|
Номер уравнения |
Пересечение с осями |
|
|
X1 (при Х2 = 0) |
Х2 (при Х1 = 0) |
|
|
Граничные прямые |
||
|
1 |
120 |
120 |
|
2 |
50 |
– |
|
3 |
– |
32 |
|
Функция цели |
||
|
Z1 = 2000 |
20 |
8 |
|
Z2 = 4000 |
40 |
16 |
Для того чтобы можно было на графике определить направление оптимизации, необходимо вычислить координаты точек пересечения второй прямой функции цели Z2 с осями координат Х1 и Х2. Данные координаты получают путем удвоения первоначального значения функции цели Z1 и значений, полученных для нее координат. Координаты прямой также заносятся в табл. 1 [4].
- Построение графика и установление области допустимых решений. График строится в следующей последовательности:
– выбирается масштаб построения графика с учетом отражения на графике максимальных значений координат точек пересечения прямых с осями Х1 и Х2;
– строятся оси прямоугольной системы координат Х1 (горизонтальная ось) и Х2 (вертикальная ось), и делается разбивка делений в соответствии с выбранным масштабом для каждой из осей;
– на осях Х1 и Х2 откладываются координаты точек пересечения, полученные для соответствующего уравнения. Через данные точки проводится прямая. Если вычислена только одна координата точки пересечения, то это означает, что через данную точку пройдет прямая, параллельная другой оси координат. Аналогичным образом строятся прямые для всех уравнений и для двух значений функции цели Z1, Z2;
– после построения на графике граничных прямых относительно каждой из них устанавливается местоположение полуплоскости, содержащей допустимые решения для соответствующего ей неравенства. В каждое неравенство подставляются вместо неизвестных Х1 и Х2 значения начала оси координат, т.е. Х1 = 0, Х2 = 0. Если подставленные значения удовлетворяют неравенству (т.е. соблюдается его смысл), то область допустимых решений (ОДР) расположена в той полуплоскости, которая находится от прямой со стороны начала координат. Если не удовлетворяют, то область допустимых решений находится с противоположной от начала координат стороны прямой [2].
Направление расположения области допустимых решений относительно каждой из прямых показывается стрелкой в сторону расположения полуплоскости, удовлетворяющей условиям неравенства. В результате этого устанавливаются границы области допустимых решений (ограничивающие ее прямые), а сама область штрихуется (рис. 1).
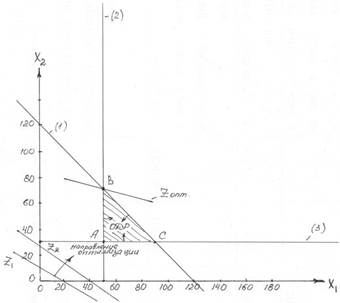
Рис. 1. Область допустимых решений задачи
- Поиск оптимального решения задачи. Поиск оптимального решения задачи осуществляется в следующей последовательности:
– прямую, параллельную прямым Z1 и Z2, перемещают в направлении оптимизации (в ту сторону, в которой находится Z2 по отношению к Z1) до последней точки или грани касания с областью допустимых решений;
– с графика снимаются координаты точки касания Zопт с областью допустимых решений. Они соответствуют оптимальным значениям неизвестных Х1 и Х2. Если же линия Zопт касается грани ОДР, то координаты любой точки грани являются оптимальным решением задачи. Это означает, что существует бесчисленное множество оптимальных решений, но при этом значение функции цели остается неизменным;
– для контроля правильности решения задачи координаты точки оптимума (точки касания) подставляются в исходные неравенства. В результате данной подстановки неравенства превращаются в равенства или сохраняют свой смысл;
– оптимальные значения неизвестных подставляются в функцию цели, и вычисляется ее оптимальное значение;
– формулируется полный ответ решенной задачи [1].
Метод потенциалов представляет собой упрощенную модификацию распределительного метода, в котором предусматривается замена рассмотренного выше алгоритма распределительного метода в части «Анализ плана на оптимальность» на упрощенную процедуру, исключающую необходимость построения замкнутых контуров. Это обеспечивает методу потенциалов ряд преимуществ по сравнению с обычным распределительным методом: становится возможной реализация алгоритма метода на ЭВМ и, соответственно, решение задач с большим количеством поставщиков и потребителей.
Методика решения транспортной задачи методом потенциалов по этапам решения та же, что и в распределительном методе:
– постановка задачи;
– составление исходной матрицы;
– составление исходного допустимого базисного плана;
– анализ плана на оптимальность;
– улучшение плана;
– контроль решения задачи.
Однако этап «Анализ плана на оптимальность» имеет свой алгоритм, присущий только методу потенциалов. На данном этапе решения задачи выполняются следующие действия:
- Вычисляются потенциалы α и β через коэффициенты Сij занятых клеток плана.
- План анализируется на оптимальность через построение неравенств для свободных клеток плана [5].
- Вычисляются числовые характеристики для неравенств, не отвечающих условиям оптимальности плана.
К вычислению потенциалов α и β приступают после составления исходного допустимого базисного плана по алгоритму распределительного метода.
Под потенциалами α и β понимаются относительные числа (оценки), выражающие в экономическом смысле, например, стоимость единицы перевозимого груза в i-м пункте отправления (потенциал αi) и в j-м пункте назначения (потенциал βj).
Вычисление потенциалов выполняется через коэффициенты Сij в занятых клетках плана по следующим формулам:
βj = αi + Сij , (1)
αi = βj – Сij , (2)
где αi – потенциал, относящийся к пункту отправления;
βj – потенциал, относящийся к пункту назначения;
Сij – коэффициент, выражающий по условиям задачи расстояние или стоимость перевозки единицы груза от i-го поставщика до j-го потребителя.
В матрице задачи для записи потенциалов αi выделяется дополнительный столбец, а для потенциалов βj дополнительная строка.
Вычисление потенциалов по формулам (1) и (2) можно начинать с любой строки (столбца). Однако при этом необходимо соблюдать следующую последовательность действий:
– исходному (первоначальному) значению αi (или βj) присваивается произвольное круглое число (10, 100 и т.д.) с таким расчетом, чтобы при вычислении потенциалов не было отрицательных чисел;
– выбор формулы расчета зависит от того, значение какого потенциала известно, а значение какого нужно определить. Например, если в качестве исходного задан потенциал α1 = 10, то необходимо использовать формулу (2.8) для расчета недостающего потенциала βj.
Если же известен потенциал βj, а следует определить значение потенциала αi, то используют формулу (2);
– вычисление потенциалов по формулам выполняется с использованием строки и столбца, на пересечении которых находится клетка, занятая поставкой. Если, например, занятая клетка стоит на пересечении первой строки и третьего столбца матрицы и известен исходный потенциал α1 = 10, то через коэффициент С1.3 рассчитываем потенциал β3 = α1 + С1.3 = 10 + 3 = 13. Если же по третьему столбцу стоит еще одна занятая клетка, но по другой строке, то для нее рассчитывается потенциал αi через уже найденное значение потенциала β3 и коэффициент данной клетки. Например, С3.3 = 6, α1 = β3 – С3.3 = 13 – 6 = 7.
Аналогичным образом вычисляют все потенциалы αi и βj. После этого приступают к анализу плана на оптимальность [6].
Анализ плана на оптимальность выполняется путем построения неравенства для каждой свободной клетки плана и проверки их на соответствие следующим условиям:
αi + Сij ≥ βj (при решении задачи на минимум), или (3)
αi + Сij ≤ βj (при решении задачи на максимум). (4)
Признаком оптимальности плана служит соответствие всех неравенств, построенных для свободных клеток плана, типу неравенства, обусловленному функцией цели (на минимум или на максимум) решаемой задачи.
Если задача решается на минимум (Z → min), то все неравенства для свободных клеток должны быть типа (3). Если хоть одно из неравенств не соответствует данному типу (например, получилось ≤), то план не оптимален и нуждается в улучшении.
Для неравенств, которые не соответствуют требованиям оптимальности (формулы (3) или (4) в зависимости от функции цели в задаче), вычисляются характеристики для последующего улучшения плана по формуле
∑ij = αi + Сij – βj. (5)
Порядок улучшения не оптимального плана тот же, что и в распределительном методе.
Для контроля значение целевой функции можно вычислить по формуле
В экономических науках, в том числе и в таких как землеустройство, кадастр, для исследований влияния множества факторов на какой-либо процесс используются экономико-математические модели.
На современном этапе развития науки в области землеустройства и кадастров также широко применяются и различные экономико-математические методы. Преобразования земельных отношений, изменения форм собственности на земельные участки кардинально меняют размеры и границы землепользований во всех сферах деятельности. Практика показала, что для принятия правильных управленческих решений в области землепользования необходимо шире использовать математический аппарат, в том числе и методы математического программирования [4].
Возможность применения экономико-математических методов при выполнении землеустроительных и кадастровых работ связано с тем, что основные решения, принимаемые при землеустройстве, оценочных работах имеют многовариантный характер, а искомые величины задач можно связать системой уравнений и неравенств.
Таким образом, экономико-математические модели позволяют определить связь между исследуемыми явлениями, объем и достоверность требуемой для решения информации. Полученные данные анализируют, корректируют и используют для принятия решений в области землеустройства. Для того, чтоб модели и методы были актуальны, необходимо учитывать региональные особенности земель, их природно-экономические характеристики. Использование усовершенствованных многофакторных моделей, с учетом всех особенностей, в том числе для целей планирования и прогнозирования, является актуальным для теории и практики землеустройства.
Список литературы:
- Городецкий И.Ю., Сергеев А.Э. Математика в землеустройстве // сборник статей XX Международной научно-практической конференции. 2019 Издательство: “Наука и Просвещение” (ИП Гуляев Г.Ю.) (Пенза). – 2019. – С. 13-17.
- Лисуненко К.Э., Сергеев А.Э. Математические модели в экономике. В сборнике: Студенческие научные работы землеустроительного факультета: Сборник статей по материалам Всероссийской студенческой научно-практической конференции. Отв. за выпуск И.В. Соколова. 2018. С. 166-172.
- Сергеев А.Э., Сергеев Э.А., Титов Г.Н., Соколова И.В. Теория чисел: Учеб. -метод. рекомендации и контрольные работы. – Краснодар: КубГУ, 2010. – 56 c.
- Сергеев А.Э., Соколова И.В. Прикладная математика. Методические указания и задания по дисциплине для магистров направления 21.04.02 Землеустройство и кадастры. Краснодар, 2016.
- Сергеев А. Э., Соколова И. В. Прикладная математика: Методические рекомендации к выполнению заданий для магистров направления 21.04.02 «Землеустройство и кадастры». Краснодар, 2017.
- Соколова И.В., Сергеев А.Э. Прикладная математика: учеб. пособие. Краснодар: Куб ГАУ, 2018. − 96 с.
