Введение
Цель
работы заключается в разработке многоступенчатого редуктора для квадрокоптеров
с дополнительной массой, приблизительно равной 700 граммам, например:
топографическая камера, небольшая посылка, или, как в рассматриваемом случае,
антирадиационная защита и датчик для измерения уровня радиации. Разработаем
такой электропривод, который будет обеспечивать сохранение максимальной
скорости и максимальных скоростей набора высоты и снижения, а также подберем
новый аккумулятор для сохранения таких характеристик, как максимальные
дальность и высота полета, максимальное время полета и максимальное время
зависания.
Основная часть
Будем
рассматривать модернизацию квадрокоптера для исследования местности с высоким
уровнем радиации. Для того, чтобы рассчитать многоступенчатый редуктор, нам
понадобиться знать массу устанавливаемой на плату квадрокоптера защиты и
приблизительную массу такого оборудования, как датчик для измерения уровня
радиации или топографическая камера.
Расположение
редукторов на каркасе квадрокоптера показано на рис. 1. Система управления,
камера, датчики или другая полезная масса будут располагатся в центре
конструкции.
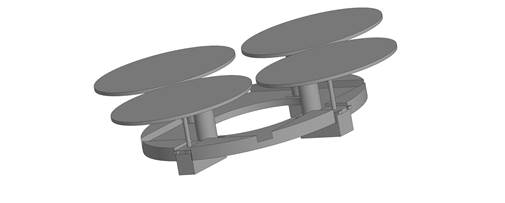
Рис.1. Расположение редукторов.
Для
защиты платы квадрокоптера мы выбрали теневую экранировку, т.е. свинцовый слой
будет находится снизу, т.к. квадрокоптер будет находиться преимущественно над
источниками радиации. Для повышения долговечности работы дрона желательно
установить на него как можно большую защиту. Но при этом она не должна быть
слишком тяжёлой, чтобы не ухудшить его лётные характеристики с новым
двигателем. Размер защищаемой платы около 4*4 сантиметров. Толщина слоя
свинца, уменьшающая уровень радиации в два раза 1.8 см. Стоит взять толщину
теневой защиты 1.8 см, потому что при меньшей толщине защита будет
недостаточной, а при дальнейшем увеличении толщины образуется слишком сильный
перевес дрона, а также снижается эффективность наращивания защиты так как
график пропускаемой защитой радиации от толщины защиты является экспонентой.
Итоговая масса защиты
|
|
(1) |
Массу самого квадрокоптера примем 1 кг, это приблизительная масса среднего
квадрокоптера.
Разрабатываемый
электропривод должен обладать определенным режимом работы, степенью защиты и
условием эксплуатации. Эти характеристики описаны в техническом задании, режим
работы S1 выбирается по ГОСТ Р 52776 – 2007. Режим работы S1 характеризуется
работой электродвигателя при постоянной нагрузке. Исполнение привода УХЛ4.1,
которое характеризуются температурой эксплуатации от – 60 до +40 С0, дает
возможность для использования квадрокоптера в исследовании северных частях
мира. Также стоит отметить, что при выборе двигателя было уделено внимания
габаритам двигателя. Был выбран двигатель из серии электродвигателей
постоянного тока коллекторных со стабилизацией частоты
вращения типа ДПМ: ДПМ-35-Н1-11.
Электродвигатели
ДПМ рекомендуется применять в качестве управляемых исполнительных
электродвигателей в системах автоматического управления, когда не требуется
высокое быстродействие, что приводит нас к еще одному важному критерию выбора
данного двигателя: двигатели данной серии экономичны, в зависимости от величины
нагрузки их ресурс лежит в интервале от 100 до 1000 часов. Стоит отметить, что
электродвигатели серии ДПМ имеют степень защиты от посторонних частиц и, в том
числе, воды IP44, что является важным фактором при работе квадрокоптера в
различных погодных условиях. Но к одним из главных достоинств относятся
его небольшие, относительно других двигателей постоянного тока, габариты и
сравнительно небольшая масса (приблизительно 340 г.).
Корпус
состоит из основания корпуса (рис. 2) и крышки корпуса (рис. 3), которые также
изготовлены из Алюминия АВ. Для фиксации крышки имеются два штифта, один из
которых вмонтирован в корпус, а другой в крышку. Для крепления корпуса привода
к корпусу квадрокоптера на основании корпуса расположены четыре “ушка”. При
проектировании корпуса рассматривался вариант сделать крышку для выходного вала
(рис. 4), но при этом сделать корпус литым. В дальнейшем было принято решение
отказаться от крышки на выходном валу и сделать в основании корпуса смотровое
окно, закрываемое крышкой корпуса. Приблизительная масса корпуса 108 г.
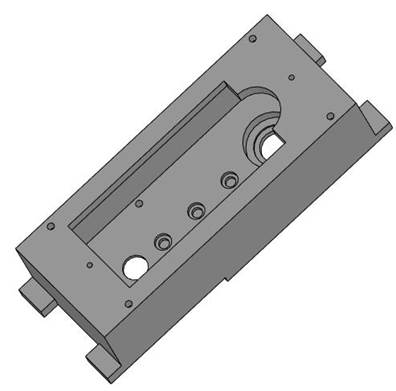
Рис.
2. Основание корпуса.
Редуктор
состоит из пяти валов, на которых нарезаны шестерни и зубчатые колеса, а на
выходном валу (рис. 4) установлены предохранительная муфта, датчик угла
поворота, также на этом валу с помощью шлицевого соединения будет закрепляться
винт. Для валов-шестерней мы назначили материал сталь 25Х13Н2. Данная сталь
обладает повышенной антикоррозионной устойчивостью, что положительно скажется
на использовании редуктора во средах с повышенной влажностью. Приблизительная
масса валов-шестерней равна 70 г.
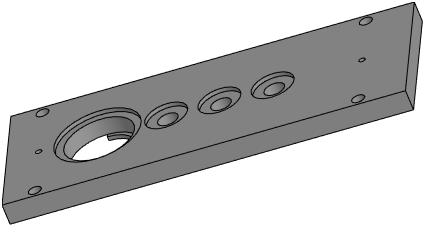
Рис.
3. Крышка корпуса.
Предохранительная
муфта состоит из верхней и нижней полумуфт, пружины и крышки пружины. Для муфты
выбираем материал Титан ВТ6. Предохранительная фрикционная муфта при
необходимости ограничивает
передаваемый крутящий момент, а также автоматически
восстанавливает работоспособность машины после прекращения действия перегрузки.
Приблизительная масса муфты равна 50 г.
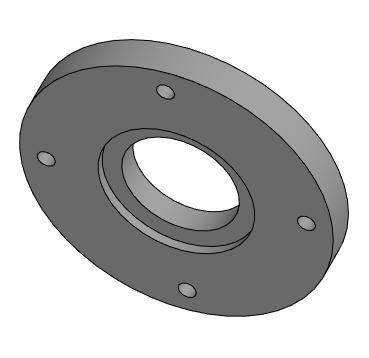
Рис.
4. Крышка выходного вала.
Датчик
угла поворота необходим для получения данных о скорости дрона и корректировании
этой скорости в зависимости от поставленной задачи. В качестве датчика мы
выбрали ERP 4080. Благодаря интерфертному методу считывания обладает высокой
точностью. Но решающим фактором выбора данного датчика является его компактный
размер и небольшая масса (приблизительно 70 г). Т.к. диаметр выходного вала
недостаточно большой для того, чтобы закрепить на нем диск со втулкой,
дополнительно установим на вал “колесо” и закрепим на нем диск со втулкой
болтами.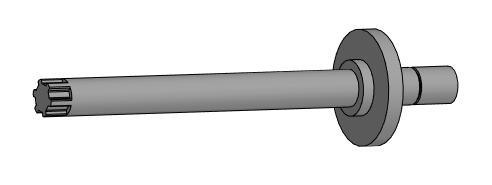
Рис.
4. Выходной вал.
Следует
учесть, что у выбранного двигателя напряжение питания и ток нагрузки меньше чем
у обычных двигателей у квадрокоптеров (12В и 5.2А). Поэтому подберем новый
аккумулятор. Для расчета емкости аккумулятора воспользуемся формулой:
|
|
(2) |
Рассмотрим случай заражения радиацией территории площадью ![]() , для упрощения
, для упрощения
форму территории заражения примем за круг с радиусом 9 км. Максимальная
скорость у среднестатистического дрона ![]() . Значит, для
. Значит, для
того, чтобы такому дрону долететь до центра данного круга и вернуться на базу,
необходимо 20 минут. Следовательно время работы примем ![]() .
.
Коэффициент K- табличное значение, подбираемое в зависимости
от типа аккумуляторной батареи, в данном расчете примем усредненное значение
K=1,428.
![]()
АКБ
с подходящей емкостью имеют приблизительную массу в 280 г, что на 80 г меньше
ранее использованной АКБ.
Далее
рассчитаем необходимую тягу, для этого сложим массу всех составляющих:
![]()
Т.е.
необходимая тяга равняется:
FTнеобх=M*g=3797/1000*9.81=37.3 Н (3)
Рассчитаем
тягу винта по формуле
![]()
где
![]() – плотность
– плотность
воздуха; ![]() – скорость
– скорость
вращения выходного вала;![]() – диаметр винта,
– диаметр винта, ![]() – коэффициент
– коэффициент
тяги винта.
![]()
Общая тяга равна:
![]()
Заключение
Из сравнения необходимой тяги и общей
тяги четырех разработанных приводов видно, что приводы выполняют задачу
обеспечения подъема квадрокоптера с новой массой. Но такие показатели, как
скорости взлета и самого полета пострадают, т.к. электроприводы должны
обеспечивать запас, равный общему весу конструкции, что в нашем случае не
выполняется. Для решения данной проблемы предлагаем разработать двигатель с
меньшей массой, т.к. именно масса двигателя составляет наибольшую часть разработанного
электропривода. Также предлагаем на рассмотрение вариант использования
двигателя, имеющего два выходных конца вала и имеющих большие значения
номинального момента, вместо двух двигателей. Для того, чтобы увеличить запас
можно изменить конструкцию корпуса, что может облегчить массу общей конструкции
приблизительно на 120 г. Также предлагаем использовать мультипликатор вместо
обычного редуктора, в таком случае можно подобрать двигатель с меньшими
габаритами и массой не рискуя ухудшить тягу винтов более слабым моментом
двигателя.
Сравнивая
же использование многоступенчатого привода с традиционным использованием
двигателя без редуктора на квадрокоптерах стоит отметить, что многоступенчатый
привод более технологично затратный, также он имеет большую массу, но при этом
обеспечивает полезную тягу выше чем у большинства двигателей, используемых на
современных квадрокоптерах. Также преимуществом разработанного привода является
защита платы двигателя от радиации корпусом и редуктором, что увеличивает срок
службы квадрокоптера в рассматриваемых условиях.
Список литературы
1.
Кокорев Ю.А., Жаров В.А., Торгов Л.М. Расчет электромеханического привода:
учеб. пособие / под ред. В.Н.Баранова, М.: изд. МГТУ им. Н.Э.Баумана, 1995, 132
с.
2.
Основы конструирования приборов: Метод. указания и технические задания по
курсовому проектированию / В.Н. Баранов, А.А. Буцев, А.И. Еремеев и др; Под
ред. В.Н. Баранова. М.: Изд-во МГТУ им. Н.Э. Баумана, 1998. 80 с.
3.
Детали машин. Курсовое проектирование: Учеб. пособие для машиностроит. спец.
учреждений среднего профессионального образования. – 5-е издание, дополн. – М.:
Машиностроение, 2004.-560 с.
4.
Элементы приборных устройств. Курсовое проектирование / Под ред. О.Ф. Тищенко
Ч. l, 2. М.: Высш. шк., 1978. Ч. 1. 178 с; Ч. 2. 183 с.
5.
Электродвигатели приборных устройств: Учебное пособие/ Под ред. д.т.н.
профессора Городничева В.А -2-е изд. перераб. и дополненное.- М.: МГТУ им. Н.Э.
Баумана.—2015 г.
